Bozuk görüntü, görüntü işleme süreçlerini zorlaştıran bir durumdur bu yüzden çoğu zaman bu bozuklukları düzeltmek gerekir. Düzeltme işlemini lens, kamera, kayıt cihazı değiştirerek düzeltmek çoğu zaman sonuç versede bizim amacımız bunu yazılımsal olarak düzeltmektir. Bu yazıda görüntü bozukluklarını, kamera kalibrasyonu ile gerekli matrisleri hesaplamayı ve bozuk görüntüyü düzeltmeye çalışacağız.
Görüntü Bozulmaları/Bozuklukları
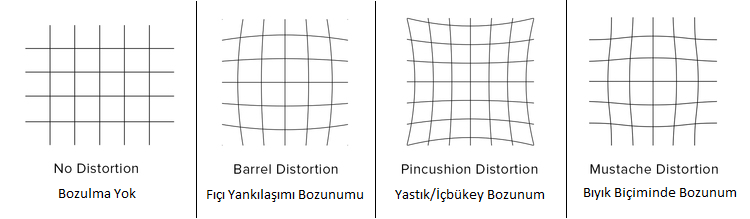
Görüntü bozuklukları kullanılan kamera, lens, açı, ışık vb. gibi bir çok etkene bağlı olarak farklı gruplara ayrılırlar. En sık karşılaşılan ve bu yazıdada ele alacağımız bozukluklar radyal bozulmalar olacak. Radyal bozulmalar genellikle kamera lensi kaynaklıdır ve kendi içerisinde üç başlığa ayrılmaktadır;
- Fıçı Yaklaşımı Bozunum (Barrel Distortion)
- Yastık/İçbükey Bozunum (Pincushion Distortion)
- Bıyık Biçiminde Bozunum (Mustache Distortion)
 Görüntü bozulmaları
Görüntü bozulmaları
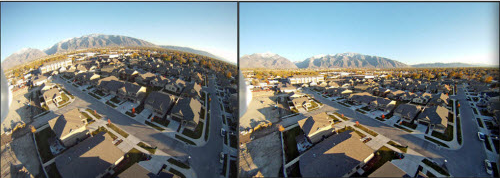
Barrel Distortion: Fıçı yaklaşımı bozulması veya varil distorsiyonu olarak adlandırılan bu bozulma şekline en çok balık gözü (fisheye) lenslerde raslanır, aşağıdaki görüntüde de görebileceğiniz üzere yaklaştırma efekti uygulanmışcasına nesneler merkeze doğru yaklaştıkça büyürken kenarlara doğru küçülürler.
Pincushion Distortion: Yastık veya içbükey bozulma olarak adlandırılan bu bozulma şeklinde, merkezden kenarara doğru gidildikçe düz çizgiler iç bükey hale gelir böylelikle bu çizgiler yastık şekli oluşturur.
Mustache Distortion: Bıyık şeklinde bozulma olarak adlandırılan bu bozulmada, çizgiler merkezden köşelere doğru “Gidon Bıyık” şekline benzer bir eğri biçimindedir. Görüntü üzerinde bu bozulmayı çoğu zaman tespit edemeyebilirsiniz. Bu durumun çözümü için genellikle lens değişimi gerekir. Aşağıdaki resimde raylara ve iki duvarın kesişim noktasına bakarsanız bu bozulmayı çok net görebilirsiniz.

Kamera Kalibrasyonu
Kamera kalibrasyonu görüntü bozukluğunu düzeltmek için gerekli bazı verilere ulaşmak için yapılır. Kamera kalibrasyonu, bozuk görüntü kaynağı yani kamera üzerinde uygulanır ve bu kalibrasyon verileri kameraya özeldir yani hangi kameradaki görüntü düzeltmek isteniyorsa kalibrasyon işlemide o kamera üzerinde uygulanmalıdır. Kalibrasyon işlemi ile aşağıdaki verilere ulaşırız;
- Kamera Matrisi
- Bozulma katsayılarının çıkış vektörü (k1, k2, k3, k4).
Kamera matrisi 3x3 boyutunda bir matristir genellikle “K” olarak da adlandırılır. Çıkış vektörü ise genellikle “D” olarak adlandırılır. OpenCV dökümanlarında bu değerlere “camera matrix” ve “dist coeff” denildiğinide görebilirsiniz. Elde ettiğimiz bu veriler ile bozuk görüntüyü düzeltebiliriz. Şimdi bu verilere nasıl ulaşabileceğimize bakalım. Kamera kalibrasyonu için bir çok farklı algoritma geliştirilmiştir, bu algoritmalar referans noktaları kullanarak oluşan bozulmayı hesaplamaya çalışır. Bizde kalibrasyonu satranç tahtası ile gerçekleştireceğiz. OpenCV içerisinde gelen kalibrasyon modülü ile bizim için gerekli olan K ve D değerlerini elde etmeye çalışacağız.
Kalibrasyon Süreci
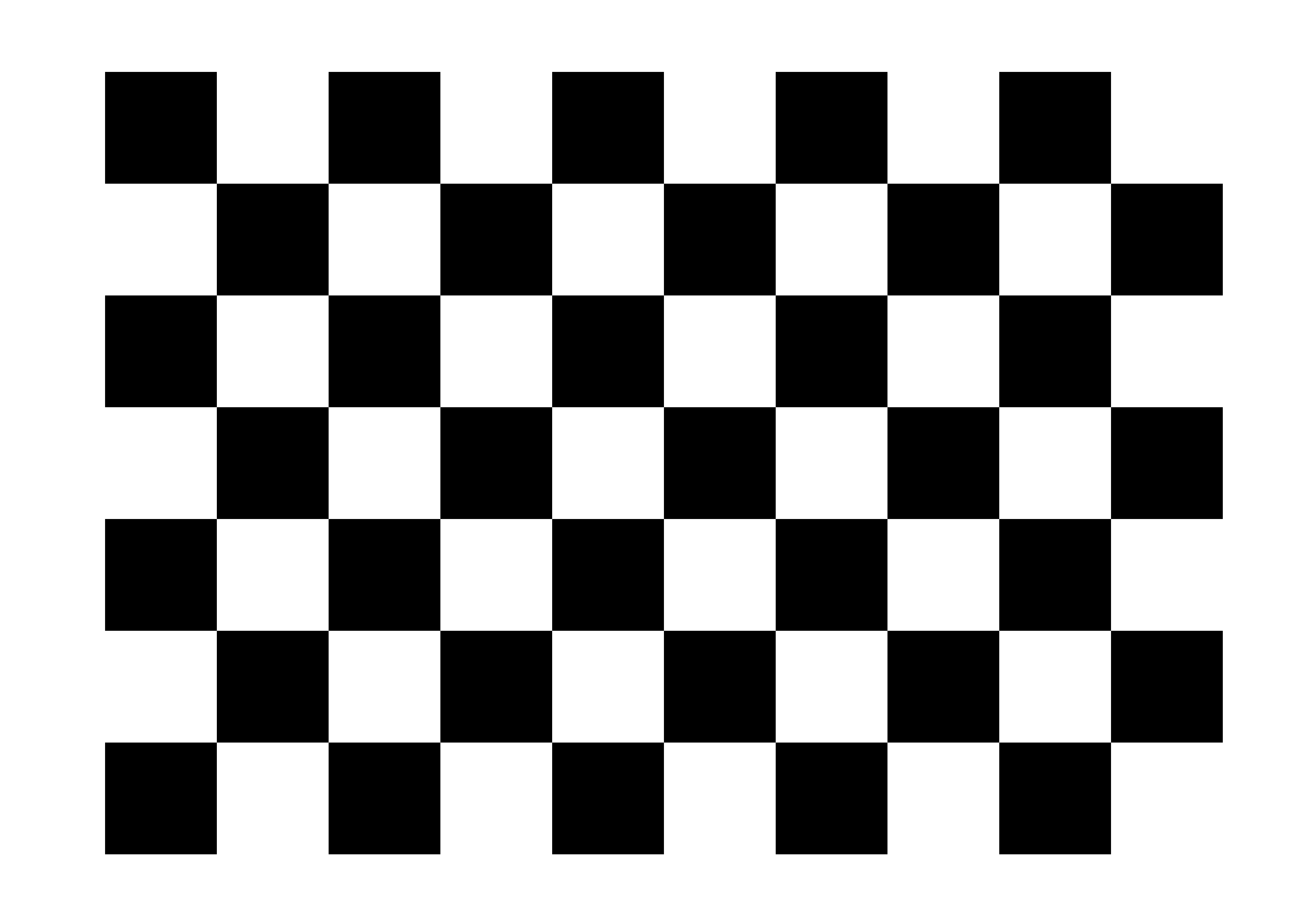
Öncelikle satır ve sütün sayısını bildiğimiz bir santraç tahtası görseline ihtiyacımız var, ben aşağıdakini kullanacağım sizde bunu tam boy olarak çıktı alıp kullanabilirsiniz, farklı ölçülerde bir desen kullanmak istiyorsanız kaynak kodda ilgili satır ve sütün alanını değiştirmelisiniz.
Kalibrasyon için bozulmaya neden olan kameranın karşısına (santraç deseninin tamamı görülebilecek şekilde) geçilir. findChessboardCorners() metodu ile giriş olarak vereceğimiz görüntü üzerindeki köşeler hesaplanır. Eğer belirttiğimiz satır ve sütün sayısınca köşe doğru olarak tespit edilmişse cornerSubPix() metodu ile köşelerin veya radyal sırt noktalarının alt pikselinin, doğru konumunu bulmak için kendi içerisinde yineler. Elde ettiğimiz bu noktaları ve değerleri kalibrasyon verisi olarak saklayabiliriz. Bu kalibrasyon işlemini kendi belirleyeceğimiz bir iterasyon adeti boyunca tekrarlarız her tekrarlama periyodunda farklı bir açıdan alınmış görüntüyü kullanarak bu noktaların doğruluğunu sağlarız aksi taktirde kalibrasyon verisi yanlış olacak ve düzeltilmeye çalışılan görüntü daha kötü hale gelecektir.
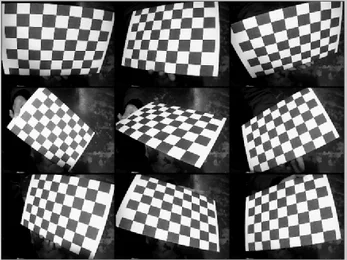
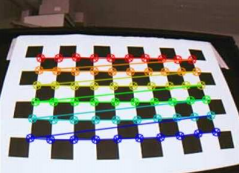
Kalibrasyon işlemi esnasında drawChessboardCorners() metodunu kullanarak tespit edilen noktaları görüntü üzerinde işaretleyebiliriz bu metot ile hangi frame için hesaplanan kalibrasyon verisinin işinize yarayıp yaramayacağına karar verebilirsiniz. Bu metot aşağıdaki gibi bir çıktı verecektir.
Görüntü Düzeltme
Kalibrasyon ile elde ettiğimiz K ve D verileri ve OpenCV undistort* metotlarını kullanarak bozuk görüntüyü düzeltebiliriz. Bu metotlar parametre olarak K ve D verilerine ihtiyaç duyar, sonuç olarak ise size düzeltilmiş görüntü dönecektir.
 Kalibrasyon ve düzeltme için örnek Java, Python projelerine aşağıdaki github linki üzerinden ulaşabilirsiniz. https://github.com/mesutpiskin/undistortion
Kalibrasyon ve düzeltme için örnek Java, Python projelerine aşağıdaki github linki üzerinden ulaşabilirsiniz. https://github.com/mesutpiskin/undistortion
Balık gözü (fisheye) bir lens ile elde ettiğiniz Fıçı Yaklaşımı Bozunuma (Barrel Distortion) uğramış görüntüyü düzeltmek istiyorsanız OpenCV 3.x ile gelen Fisheye modülünü kullanmanız daha başarılı sonuçlar elde etmenizi sağlayacaktır. Bunun için aşağıda bağlantısını verdiğim örneği kullanabilirsiniz. Bu örnekte bir klasör içerisindeki görüntüleri kullanarak kalibrasyon işlemi yapılmaktadır.
https://gist.github.com/mesutpiskin/0412c44bae399adf1f48007f22bdd22d Faydalı Kaynaklar
- http://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_calib3d/py_calibration/py_calibration.html
- https://docs.opencv.org/3.0-beta/modules/imgproc/doc/feature_detection.html#cornersubpix
- http://ais.informatik.uni-freiburg.de/teaching/ws09/robotics2/pdfs/rob2-08-camera-calibration.pdf
- https://www.hgk.msb.gov.tr/images/dergi/makaleler/123_4.pdf